 | Simulation 2D Boxes |  |
Basic simulation using falling 2d boxes - with impulses for resolving box-box intersections/collisions.
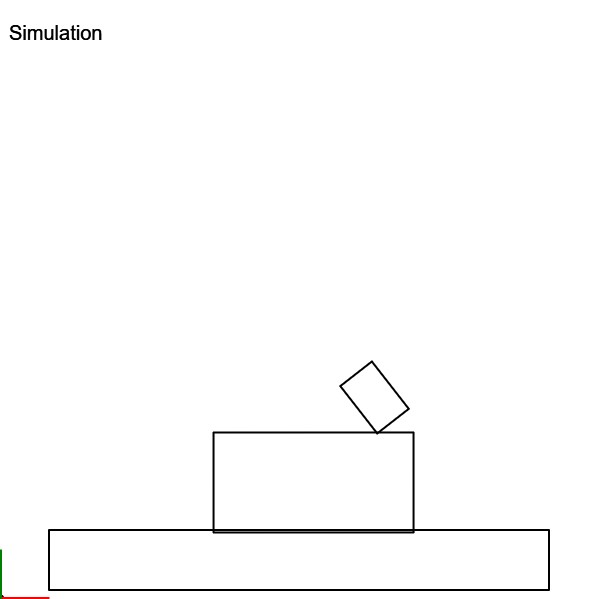 Simulation 2d boxes (WebGPU Compute) Simulation 2d boxes (WebGPU Compute)
Functions Used: requestAdapter(), getPreferredCanvasFormat(), createCommandEncoder(), beginRenderPass(), setPipeline(), draw(), end(), submit(), getCurrentTexture(), createView(), createShaderModule()
Complete Code
<?php
let div = document.createElement('div');
document.body.appendChild( div );
div.style['font-size'] = '20pt';
function log( s )
{
console.log( s );
let args = [...arguments].join(' ');
div.innerHTML += args + '<br>';
}
log('WebGPU Compute Example');
if (!navigator.gpu) { log("WebGPU is not supported (or is it disabled? flags/settings)"); return; }
const adapter = await navigator.gpu.requestAdapter();
const device = await adapter.requestDevice();
let canvas = document.createElement('canvas');
canvas.id = 'canvas';
canvas.style.border = '1px solid orange';
document.body.appendChild( canvas ); canvas.height = canvas.width = 600;
// -------------------------------------------------------------------
// Grouped data into vec4 groups - help with alignment/packing
const NUMBER_OBJECTS = 3;
const SIZE_EACH_OBJECT = 4 * 4 * 4; // Number floats for each object structure (vel, pos, size, ..)
const objectArray0 = new Float32Array( NUMBER_OBJECTS * SIZE_EACH_OBJECT );
const objectBuffer0 = device.createBuffer({ size: objectArray0.byteLength, usage: GPUBufferUsage.STORAGE | GPUBufferUsage.COPY_DST | GPUBufferUsage.COPY_SRC });
device.queue.writeBuffer(objectBuffer0, 0, objectArray0);
const objectBuffer1 = device.createBuffer({ size: objectArray0.byteLength, usage: GPUBufferUsage.STORAGE | GPUBufferUsage.COPY_DST | GPUBufferUsage.COPY_SRC });
device.queue.writeBuffer(objectBuffer0, 0, objectArray0);
// ----------------------------------------------------------------
const objectBufferTmp = device.createBuffer({ size: objectArray0.byteLength, usage: GPUBufferUsage.COPY_DST | GPUBufferUsage.MAP_READ });
// ----------------------------------------------------------------
const timestep = new Float32Array( [0.0] );
const timerUniformBuffer = device.createBuffer({ size: timestep.byteLength, usage: GPUBufferUsage.UNIFORM | GPUBufferUsage.COPY_DST });
device.queue.writeBuffer(timerUniformBuffer, 0, timestep );
// ----------------------------------------------------------------
const mouse = new Float32Array( [0.0, 0.0] );
const mouseUniformBuffer = device.createBuffer({ size: mouse.byteLength, usage: GPUBufferUsage.UNIFORM | GPUBufferUsage.COPY_DST });
device.queue.writeBuffer(mouseUniformBuffer, 0, mouse );
// ----------------------------------------------------------
// Bind group layout and bind group
const bindGroupLayout = device.createBindGroupLayout({
entries: [
{binding: 0, visibility: GPUShaderStage.COMPUTE, buffer: { type: "uniform" } },
{binding: 1, visibility: GPUShaderStage.COMPUTE, buffer: { type: "uniform" } },
{binding: 2, visibility: GPUShaderStage.COMPUTE, buffer: { type: "storage" } },
{binding: 3, visibility: GPUShaderStage.COMPUTE, buffer: { type: "storage" } }
]
});
const bindGroup0 = device.createBindGroup({ layout: bindGroupLayout,
entries: [ { binding: 0, resource: { buffer: timerUniformBuffer } },
{ binding: 1, resource: { buffer: mouseUniformBuffer } },
{ binding: 2, resource: { buffer: objectBuffer0 } },
{ binding: 3, resource: { buffer: objectBuffer1 } }
] });
const bindGroup1 = device.createBindGroup({ layout: bindGroupLayout,
entries: [ { binding: 0, resource: { buffer: timerUniformBuffer } },
{ binding: 1, resource: { buffer: mouseUniformBuffer } },
{ binding: 2, resource: { buffer: objectBuffer1 } },
{ binding: 3, resource: { buffer: objectBuffer0 } }
] });
// Compute shader code
const computeShader = `
struct stObject {
// object data
p : vec4<f32>, // position and rotation (xy position, z angle)
s : vec4<f32>, // size
v : vec4<f32>, // velocity - linearly (xy) angular (z)
m : vec4<f32>, // inverse mass - linear / angular
}
struct stObjectDiff {
// object data
p : vec2<f32>,
a : vec2<f32>,
b : vec2<f32>,
i : u32,
ai : u32,
bi : u32
}
struct stHit {
pen : f32,
normal : vec2<f32>,
point : vec2<f32>
};
@binding(0) @group(0) var<uniform> mytimer : f32;
@binding(1) @group(0) var<uniform> mymouse : vec2<f32>;
@binding(2) @group(0) var<storage,read_write> objects0 : array< stObject , ${NUMBER_OBJECTS} >;
@binding(3) @group(0) var<storage,read_write> objects1 : array< stObject , ${NUMBER_OBJECTS} >;
fn rotatePoint(point: vec2<f32>, angle: f32) -> vec2<f32> {
let c = cos(angle);
let s = sin(angle);
return vec2<f32>(
point.x * c - point.y * s,
point.x * s + point.y * c
);
}
fn cross2D(a: vec2<f32>, b: vec2<f32>) -> f32 {
return a.x * b.y - a.y * b.x;
}
fn perp( n:vec2<f32> ) -> vec2<f32> {
return vec2<f32>(n.y, -n.x);
}
fn closestPoint( pA:vec2<f32>, pB:vec2<f32>, pX:vec2<f32> ) -> vec2<f32>
{
let b = length( pB - pA );
if ( b < 0.0001 )
{
return pA;
}
let n = normalize( pB - pA );
let pAX = pX - pA;
let s = dot( n, pAX );
let a = length( n * s );
let t = a/b;
if ( t <= 0 ) { return pA; }
if ( t >= 1 ) { return pB; }
let pT = pA + (pB - pA) * t;
return pT;
}
// order points for a triangle are in a clockwise or counterclockwise direction
fn getCW( v1:vec2<f32>, v2:vec2<f32>, v3:vec2<f32> ) -> f32
{
let n1 = normalize( v2 - v1 );
let n2 = normalize( v3 - v1 );
let d = cross2D(n1, n2);
if ( d < 0.0 ) { return -1.0; }
return 1.0;
}
struct stMinkowskiData
{
shapeA : array< vec2<f32>, 4 >,
shapeB : array< vec2<f32>, 4 >,
shapeBA : array< stObjectDiff, 16 >
};
fn MinkowskiBox(boxA:stObject, boxB:stObject) -> stMinkowskiData
{
var md : stMinkowskiData;
let corners = array< vec2<f32>, 4 >(vec2<f32>( -1, -1 ),
vec2<f32>( 1, -1 ),
vec2<f32>( 1, 1 ),
vec2<f32>( -1, 1 ) );
for (var i=0; i<4; i++)
{
md.shapeA[i] = rotatePoint( corners[i] * boxA.s.xy , boxA.p.z ) + boxA.p.xy;
md.shapeB[i] = rotatePoint( corners[i] * boxB.s.xy , boxB.p.z ) + boxB.p.xy;
}
var c:u32 = 0;
for (var i:u32=0; i< 4; i++)
{
let pA = md.shapeA[i];
for (var k:u32=0; k< 4; k++)
{
let pB = md.shapeB[k];
let pBA = pB - pA;
md.shapeBA[c].p = pBA;
md.shapeBA[c].a = pA;
md.shapeBA[c].b = pB;
md.shapeBA[c].i = c;
md.shapeBA[c].ai = i;
md.shapeBA[c].bi = k;
c++;
}
}
return md;
}
fn getSupport( md:stMinkowskiData, dir:vec2<f32> ) -> stObjectDiff
{
let n = normalize( dir );
var d = dot( md.shapeBA[0].p, n );
var h:u32 = 0;
for (var i:u32=0; i< 16; i++)
{
let t = dot( md.shapeBA[i].p, n );
if ( t > d )
{
d = t;
h = i;
}
}
return md.shapeBA[h];
}
struct stEdge {
e0 : stObjectDiff,
e1 : stObjectDiff
}
fn collision( md:stMinkowskiData ) -> stHit
{
var hit : stHit;
hit.pen = 9999.9;
var v1 = getSupport( md, vec2<f32>(0, 1) );
var v2 = getSupport( md, vec2<f32>(1, 0) );
var v3 = getSupport( md, vec2<f32>(0,-1) );
if ( v2.i == v1.i || v2.i == v3.i )
{
// swap them around to keep things ordered clockwise
v2 = v3;
v3 = getSupport( md, vec2<f32>(-1, 0) );
}
//console.assert( v1.i != v2.i);
//console.assert( v2.i != v3.i);
var edges = array< stEdge , 5 >();
var numEdges:u32 = 0;
edges[numEdges].e0 = v1; edges[numEdges].e1 = v2; numEdges++;
edges[numEdges].e0 = v2; edges[numEdges].e1 = v3; numEdges++;
edges[numEdges].e0 = v3; edges[numEdges].e1 = v1; numEdges++;
edges[numEdges].e0 = v3; edges[numEdges].e1 = v1; numEdges++;
edges[numEdges].e0 = v3; edges[numEdges].e1 = v1; numEdges++;
var hullEdges = array< stEdge , 16 >();
var numHullEdges = 0;
var check = 0;
while ( numEdges > 0 )
{
var eedge = edges[numEdges-1];
numEdges--;
let n = normalize( perp( eedge.e0.p - eedge.e1.p ) );
let v4 = getSupport( md, n );
if ( v4.i == eedge.e0.i ||
v4.i == eedge.e1.i )
{
// save edge
hullEdges[ numHullEdges ] = stEdge();
hullEdges[ numHullEdges ] = eedge;
numHullEdges++;
}
else
{
numEdges++;
edges[ numEdges-1 ] = stEdge();
edges[ numEdges-1 ].e0 = eedge.e0;
edges[ numEdges-1 ].e1 = v4;
numEdges++;
edges[ numEdges-1 ] = stEdge();
edges[ numEdges-1 ].e0 = v4;
edges[ numEdges-1 ].e1 = eedge.e1;
}
//console.assert( edges.length < 100 );
check++;
//console.assert(check<100);
if ( check > 100 )
{
hit.pen = 99999.9;
return hit;
}
}
var sdist = 10000.0;
var indx = 0;
var best = vec2<f32>(0.0);
for (var i=0; i<numHullEdges; i++)
{
let edge = hullEdges[i];
//drawLine( edge.e0.p, edge.e1.p, 'orange' );
let cp = closestPoint( edge.e0.p, edge.e1.p, vec2<f32>(0,0) );
//drawCircle( cp, 4, 'yellow' );
let d = length( cp - vec2<f32>(0.0,0.0) );
if ( d < sdist )
{
sdist = d;
indx = i;
best = cp;
}
}
let inside = getCW( vec2<f32>(0,0),
hullEdges[indx].e0.p,
hullEdges[indx].e1.p );
//let best = closestPoint( hullEdges[indx].e0.p,
// hullEdges[indx].e1.p,
// vec2<f32>(0,0) );
//drawCircle( best, 6, 'yellow' );
let df = length( hullEdges[indx].e0.p - hullEdges[indx].e1.p );
let d1 = length( hullEdges[indx].e0.p - best );
let t = d1/df;
//console.log( 't:' + t + ', df:' + df + ', d1: ' + d1 );
//console.assert( t >=0 && t <= 1 );
let a0 = hullEdges[indx].e0.a;
let a1 = hullEdges[indx].e1.a;
let x = a0 + ( a1 - a0 ) * t;
// drawCross( x, 40, 'orange' );
let b0 = hullEdges[indx].e0.b;
let b1 = hullEdges[indx].e1.b;
let y = b0 + ( b1 - b0 ) * t;
//drawCross( y, 40, 'orange' );
//drawLine( x, y, 'red' );
let pen = length( x - y );
let nor = normalize( x - y );
hit.pen = pen;
if ( inside <= 0.0 ) { hit.pen = pen * -1.0; }
hit.point = x;
hit.normal = nor;
return hit; // return collision data
}// end collision function
// Parameters
const dt :f32 = 0.1;
const NUMBER_OBJECTS: u32 = ${NUMBER_OBJECTS};
struct stResponse {
dv : vec2<f32>,
dw : f32
}
fn impulseResponse(
com : vec2<f32>,
hp : vec2<f32>,
vcom : vec2<f32>,
omega : f32,
m : f32, // inverse mass
I : f32, // inverse inertia
e : f32
) -> stResponse
{
var response : stResponse;
// Calculate position vector from CoM to point of contact
let r = hp - com;
// Calculate velocity of point of contact
let vp = vcom + vec2<f32>(-omega * r.y, omega * r.x);
// Calculate impulse due to collision
let J = -m * (1.0 + e) * vp;
// Update linear velocity
response.dv = J * m;
// Update angular velocity
response.dw = (r.x * J.y - r.y * J.x) * I;
// Return delta velocities
return response;
}
// Main compute shader function
@compute @workgroup_size( ${NUMBER_OBJECTS}, 1 )
fn main(
@builtin(global_invocation_id) globalId: vec3<u32>,
@builtin(local_invocation_id) localId: vec3<u32>,
@builtin(workgroup_id) workgroupId: vec3<u32>,
@builtin(num_workgroups) workgroupSize: vec3<u32>
) {
// Initialization step
if ( mytimer <= 0.0 )
{
objects0[0].p = vec4<f32>(300.0, 300.0, 0.6, 0.0);
objects0[0].s = vec4<f32>(100.0, 50.0, 0.0, 0.0);
objects0[0].v = vec4<f32>(0.0, -15.1, 0.0, 0.0);
objects0[0].m = vec4<f32>(1.0, 1, 0.0, 0.0);
objects0[1].p = vec4<f32>(300.0, 40.0, 0.0, 0.0);
objects0[1].s = vec4<f32>(250.0, 30.0, 0.0, 0.0);
objects0[1].v = vec4<f32>(0, 0, 0, 0);
objects0[1].m = vec4<f32>(0, 0, 0, 0);
if ( NUMBER_OBJECTS > 1 ){
objects0[2].p = vec4<f32>(300.0, 500.0, 0.0, 0.0);
objects0[2].s = vec4<f32>(20.0, 30.0, 0.0, 0.0);
objects0[2].v = vec4<f32>(0, 0, 0, 0);
objects0[2].m = vec4<f32>(1, 1, 0, 0);
}
//return;
}
// Read the current state of flock agent
var cp = objects0[globalId.x].p.xy; // position
var ca = objects0[globalId.x].p.z; // angle
var cs = objects0[globalId.x].s.xy; // size
var cv = objects0[globalId.x].v.xy; // linear velocity
var cw = objects0[globalId.x].v.z; // angular velocity
var cm = objects0[globalId.x].m.x; // mass
var ci = objects0[globalId.x].m.y; // inertia
// integrator
cp += cm * cv * dt;
ca += ci * cw * dt;
// neighbour body interaction/collision response
for (var i:u32 = 0; i<NUMBER_OBJECTS; i++)
{
if ( i==globalId.x ) { continue; };
let md = MinkowskiBox( objects0[globalId.x], objects0[i] );
let hit = collision( md );
if ( hit.pen > 0.0 ) { continue; }
// relative offset from com to point
let r = ( hit.point - cp );
// velocity of the point
let vp = cv + vec2<f32>(-cw * r.y, cw * r.x);
// moving away from each other?
if ( dot( hit.normal, vp ) < 0.0 ) { continue; }
// penalty based force
/*
// linear
cv += hit.normal * hit.pen * (1.0/dt) * dot(hit.normal,vp) * 0.01;
// angular
cw -= cross2D( r, hit.normal ) * 0.001;
*/
// impulse
// impulse force
let res = impulseResponse( cp, hit.point, cv, cw, cm, ci, 0.1);
// linear response
cv += res.dv;
// angular response
cw += res.dw*0.00005;
// fudge factor - to resolve 'issues' - numerical problems/error
cp += cm * hit.normal * hit.pen * 0.1;
}// end for i
//cw *= 0.95;
// environmental interaction/reaction
// donward gravity
cv.y += -1.0;
// Write output state of flock agent to flockOut
objects1[globalId.x].p = vec4<f32>( cp, ca, 0 );
objects1[globalId.x].s = vec4<f32>( cs, 0, 0 );
objects1[globalId.x].v = vec4<f32>( cv, cw, 0 );
objects1[globalId.x].m = vec4<f32>( cm, ci, 0, 0 );
}
`;
// Pipeline setup
const computePipeline = device.createComputePipeline({
layout : device.createPipelineLayout({bindGroupLayouts: [bindGroupLayout]}),
compute: { module : device.createShaderModule({code:computeShader}),
entryPoint: "main" }
});
let off = {x:0, y:0};
let cur = {x:0, y:0};
async function drawCircle(ctx, px, py, r, color='blue')
{
// Draw circle
ctx.strokeStyle = color;
ctx.beginPath();
ctx.arc(off.x+px, canvas.height - off.y-py, r, 0, Math.PI * 2);
ctx.stroke(); // Draw outline
ctx.closePath();
}
async function drawLine(ctx, p0, p1, color='green', thickness=2 )
{
ctx.lineWidth = thickness;
ctx.strokeStyle = color;
ctx.beginPath();
ctx.moveTo(off.x+p0.x, canvas.height - off.y-p0.y);
ctx.lineTo(off.x+p1.x, canvas.height - off.y-p1.y);
ctx.closePath();
ctx.stroke();
}
function rotatePoint( point, angle )
{
let c = Math.cos(angle);
let s = Math.sin(angle);
return new vec2(
point.x * c - point.y * s,
point.x * s + point.y * c
);
}
function vec2(x, y)
{
this.x = x;
this.y = y;
this.set = function(x, y)
{
this.x = x;
this.y = y;
}
};
vec2.add = function(v0, v1){ return new vec2(v0.x+v1.x, v0.y+v1.y); }
vec2.sub = function(v0, v1){ return new vec2(v0.x-v1.x, v0.y-v1.y); }
vec2.scale = function(v0, s ){ return new vec2(v0.x*s, v0.y*s); }
vec2.mul = function(v0, v1){ return new vec2(v0.x*v1.x, v0.y*v1.y); }
async function frame()
{
// Commands submission
const commandEncoder = device.createCommandEncoder();
{
const passEncoder = commandEncoder.beginComputePass();
passEncoder.setPipeline(computePipeline);
passEncoder.setBindGroup(0, bindGroup0);
// workgroup size on the wgsl shader
passEncoder.dispatchWorkgroups( 1 );
await passEncoder.end();
}
//timestep[0] = timestep[0] + 0.1;
//await device.queue.writeBuffer(timerUniformBuffer, 0, timestep );
{
const passEncoder = commandEncoder.beginComputePass();
passEncoder.setPipeline(computePipeline);
passEncoder.setBindGroup(0, bindGroup1);
// workgroup size on the wgsl shader
passEncoder.dispatchWorkgroups( 1 );
await passEncoder.end();
}
//timestep[0] = timestep[0] + 0.1;
//device.queue.writeBuffer(timerUniformBuffer, 0, timestep );
// Encode commands for copying buffer to buffer.
await
commandEncoder.copyBufferToBuffer(
objectBuffer1, // source buffer
0, // source offset
objectBufferTmp, // destination buffer
0, // destination offset
objectArray0.byteLength // size
);
// Submit GPU commands.
const gpuCommands = commandEncoder.finish();
await device.queue.submit([gpuCommands]);
timestep[0] = timestep[0] + 0.1;
await device.queue.writeBuffer(timerUniformBuffer, 0, timestep );
// Read buffer.
await objectBufferTmp.mapAsync(GPUMapMode.READ);
const arrayBuffer = objectBufferTmp.getMappedRange();
const array = new Float32Array( arrayBuffer );
const outputArray = Array.from( array );
//const arr = Array.from( array );
objectBufferTmp.unmap();
//console.log('outputArray:', outputArray );
//log('Collision data:')
//for (let i=0; i<arr.length; i++)
//{
// display over multiple lines
//log( arr.splice( 0, 4 ) );
//}
// Extract the positions and velocities
const ctx = canvas.getContext('2d');
ctx.clearRect(0, 0, canvas.width, canvas.height);
//console.log( 'outputArray.length:', outputArray.length );
drawCircle( ctx, 0, 0, 5, 'black' );
drawLine(ctx, {x:0,y:0}, {x:50,y:0 }, 'red' , 6.0 );
drawLine(ctx, {x:0,y:0}, {x:0, y:50}, 'green', 6.0 );
for (var i = 0; i < NUMBER_OBJECTS; i ++ )
{
let stride = 4*4;
//console.log( i );
// position
var px = outputArray[i*stride+0];
var py = outputArray[i*stride+1];
//console.log( px, py );
var angle = outputArray[i*stride+2];
//var vx = outputArray[i+4];
//var vy = outputArray[i+5];
var sx = outputArray[i*stride+4];
var sy = outputArray[i*stride+5];
//if ( pen < 0 )
{
ctx.font = "20px Arial";
ctx.fillText( 'Simulation' ,10,40);
}
{
let corners = [ new vec2( -1, -1 ),
new vec2( 1, -1 ),
new vec2( 1, 1 ),
new vec2( -1, 1 ) ];
for (let g=0; g<4; g++)
{
let p0 = vec2.add( rotatePoint( vec2.mul( corners[g], new vec2(sx,sy)) , angle ), new vec2(px,py) );
let p1 = vec2.add( rotatePoint( vec2.mul( corners[(g+1)%4], new vec2(sx,sy)) , angle ), new vec2(px,py) );
drawLine( ctx, p0, p1, 'black' );
}
}
/*
// draw square
ctx.strokeStyle = 'black';
ctx.save();
ctx.translate(off.x+px, off.y+py);
ctx.rotate(angle);
ctx.beginPath();
ctx.rect( -2*sx/2, -2*sy/2,
2*sx, 2*sy);
ctx.stroke();
ctx.restore();
*/
mouse[0] = cur.x;
mouse[1] = cur.y;
device.queue.writeBuffer(mouseUniformBuffer, 0, mouse );
}// end for i
requestAnimationFrame(frame);
}// end frame(..)
document.onmousemove = function(e)
{
cur.x = e.pageX - off.x;
cur.y = e.pageY - off.y;
}
document.onmousemove( {pageX:450, pageY:450} );
frame();
| Resources and Links | |
• WebGPU Demo Code - Stacking 2D Boxes in Real-Time

|
